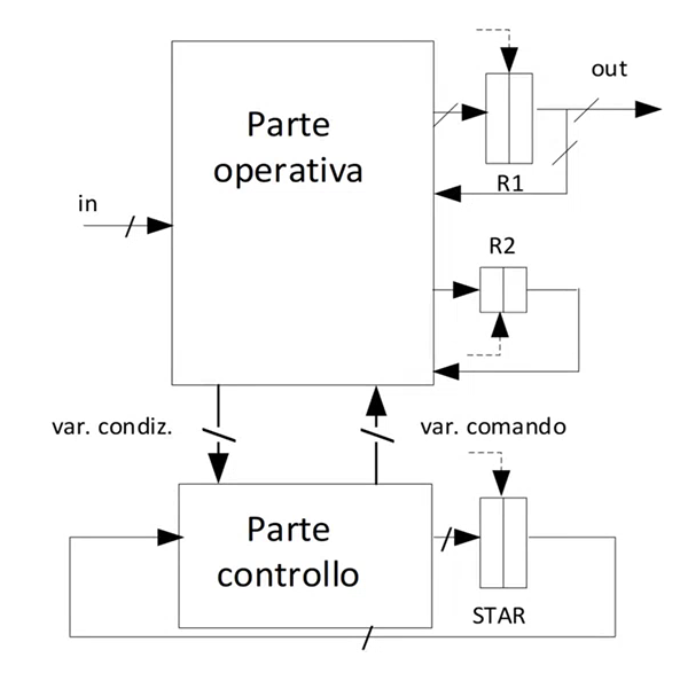
La parte operativa è quella responsabile dell’interfacciamento col mondo esterno e della produzione degli stati interni dei registri operativa.
È una RSS di Mealy (Rete Sequenziale Sincronizzata (RSS), Modello di Mealy).
La parte di controllo è quella contentente la logica per l’aggiornamento dello stato interno.
È una RSS di Moore (Modello di Moore).
Queste reti presentano la variabile di condizionamento e quella di comando
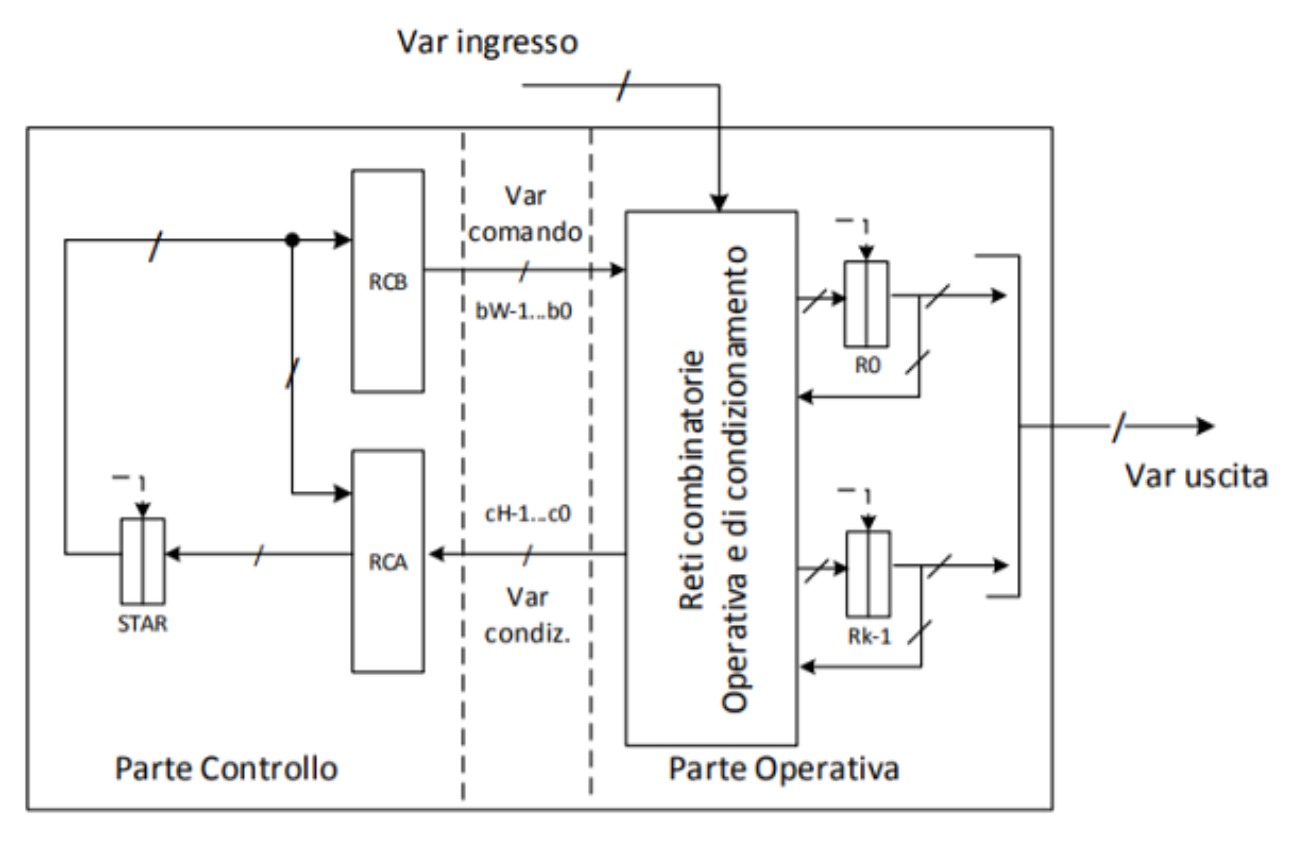
Procedimento
- Guardiamo ad ogni registro operativo come Registro Multifunzionale e isoliamo le loro relative µ-operazioni diverse. Per ogni registro operativo andiamo a sintetizzare la relativa rete combinatoria operativa. Ogni rete combinatoria operativa prende in ingresso le variabili di comando della parte di controllo e lo stato di uscita dei registri operativi.
- Adesso guardiamo i µ-salti e sintetizziamo per ogni condizione indipendente (le condizioni che determinano i µ-salti) una rete combinatoria di condizionamento, che deve generare una variabile di condizionamento, che deve valere se la condizione è vera e deve valere se la condizione è falsa.
- Adesso che abbiamo le variabili di condizionamento dobbiamo sintetizzare la parte controllo.
Riassunto
- Immaginiamo ogni registro operativo come un registro multifunzionale (cioè un registro preceduto da multiplexer).
- Nel codice Verilog cerchiamo tutte le funzioni che possono determinare il valore del registro operativo nell’assegnamento procedurale.
- Quale funzione sarà considerata dipenderà dalle variabili di condizionamento, generate dalla Parte Controllo. La cosa non è strana: è lo stato interno della rete a dirci cosa fare con un certo registro operativo.
casex(STAR)
S0 : begin
//legge per registro operativo1
//reg op 2 ecc
end
S1 : //ecc
...
endcaseImmagine Riepilogativa
Modulo ABC
- Ricordati di collegare PO e PC tramite wire con variabili di condizionamento e di comando
module ABC (
input clock, reset_,
inout[7:0] data,
output ior_, iow_,
output[11:0] out,
output[15:0] addr
);
// wire...
wire b2,b1,b0,c1,c0;
wire[2:0] mjr;
PO po(
.clock(clock), .reset_(reset_), .data(data), .iow_(iow_),
.ior_(ior_), .out(out), .addr(addr), .b2(b2), .b1(b1),
.b0(b0), .c1(c1), .c0(c0), .mjr(mjr)
);
PC pc(
.clock(clock), .reset_(reset_), .b2(b2), .b1(b1),
.b0(b0), .c1(c1), .c0(c0), .mjr(mjr)
);
endmoduleModello basato sui Microindirizzi
module PC(
input clock, reset_,
output b2,b1,b0,
input c0,c1,
input[2:0] mjr
);
reg[2:0] STAR;
localparam S0 = 3'b000,
S1 = 3'b001,
S2 = 3'b010,
S3 = 3'b011,
S0R = 3'b100,
S1RA = 3'b101,
S1RB = 3'b110;
// variabili di comando
assign { b2,b1,b0 } = STAR;
always @(reset_ == 0) #1 begin
STAR <= S0;
end
always @(posedge clock) if(reset_ == 1) #3 begin
casex(STAR)
S0: STAR <= (c0==1) ? S1 : S0R;
S1: STAR <= S0R;
S2: STAR <= S0R;
S3: STAR <= S0;
S0R: STAR <= (c1==1) ? S1RA : S1RB;
S1RA: STAR <= mjr;
S1RB: STAR <= mjr;
endcase
end
endmodule
/*
µ-indirizzo b2_b1_b0 µ-indT µ-indF c_eff µ-type
S0 000 S1 S0R c0 0
S1 001 S0R S0R - 0
S2 010 S0R S0R - 0
S3 011 S0 S0 - 0
S0R 100 S1RA S1RB c1 0
S1RA 101 - - - 1
S1RB 110 - - - 1
*/